Calculateur de rapport de démultiplication différentielle
Table des matières
- Introduction
- Valeur initiale du rapport de démultiplication
- Valeur finale du rapport de démultiplication
- Correction du rapport de démultiplication
- Schéma logique
- Exemple pour un véhicule à combustion interne
- Exemple pour un véhicule électrique
- Calculatrice
Introduction
Pour être clair dès le début, cet article n’explique pas comment calculer le rapport de transmission pour un ensemble de vitesses donné. Si vous voulez savoir comment calculer le rapport de démultiplication pour une paire de vitesses donnée, lisez l’article Comment calculer un rapport de démultiplication?
Cet article explique comment le rapport de démultiplication du différentiel est choisi/calculé/déterminé pour un véhicule donné, pour lequel nous connaissons certains paramètres.
Lors de la conception du groupe motopropulseur d’un nouveau véhicule, qu’il soit alimenté par un moteur à combustion interne ou une machine électrique, nous devons décider du rapport de transmission que nous allons avoir sur le différentiel (également appelé entraînement final).
Si vous vérifiez différents véhicules, vous verrez qu’ils ont des rapports de transmission différents pour leur différentiel. Quelques exemples sont décrits dans le tableau ci-dessous:
| Véhicule | Vitesse maximale | Taille des roues | Vitesse moteur / moteur @ puissance maximale |
Rapport de transmission final | |
| 19MON BMW M2 | 280 | 265/35 ZR 19 98 ANS | 6250 | 0.85 | 3.46 |
| 21MA Ford Mustang Mach-E | 180 | 225/ 60R18 | 12000 | 1.00 | 9.05 |
Les données pour la BMW ont été extraites de carfolio.com . Les données de la Ford Mustang Mach-E ont été extraites de diverses sources sur Internet. La vitesse maximale du moteur est une approximation, toutes les autres données sont fournies par le fabricant.
Comme vous pouvez le voir, il existe différentes valeurs pour le rapport de transmission du différentiel. La question à laquelle nous allons essayer de répondre est: Quel rapport de démultiplication mon différentiel doit-il avoir? La réponse à cette question vient de la physique, ce n’est pas une supposition.
Pour calculer le rapport de transmission du différentiel, nous devons connaître les éléments suivants:
- la vitesse maximale du véhicule
- le rayon de roulement des roues
- le régime moteur pour la puissance maximale (si le véhicule est alimenté par un moteur à combustion interne) ou la vitesse maximale du moteur (dans le cas d’un véhicule électrique)
- le rapport (dernier rapport de la boîte de vitesses) dans lequel la vitesse maximale est obtenue (il s’agit généralement du rapport supérieur pour les véhicules à hautes performances dynamiques ou le rapport avant la vitesse maximale pour la majorité des véhicules)
La vitesse maximale du véhicule est une valeur prédéfinie, c’est une cible de conception. Habituellement, lorsqu’un constructeur conçoit un nouveau véhicule, il définit quelle est sa vitesse de pointe.
Le rayon de roulement peut être approximé en utilisant le symbole du pneu (par exemple 225/60R18). Pour comprendre comment calculer le rayon de roulement à partir du symbole du pneu, lisez l’article Comment calculer le rayon de roue.
Si le véhicule est propulsé par un moteur à combustion interne, nous devons connaître la caractéristique du moteur en termes de régime moteur à puissance maximale. Cela est nécessaire car la vitesse maximale du véhicule est obtenue lorsque le moteur tourne à la puissance maximale (généralement 5% au-dessus de la vitesse maximale). Nous supposons également que nous savons dans quel rapport de la boîte de vitesses la vitesse maximale est obtenue.
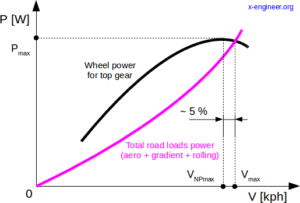
Image: Critères de vitesse maximale fonction de la puissance et des charges routières – moteur à combustion interne |
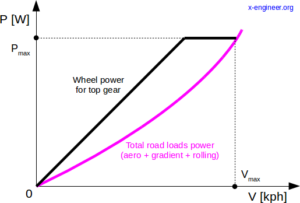
Image: Critères de vitesse maximale fonction de la puissance et des charges routières – moteur électrique |
Si le véhicule est alimenté par un moteur électrique, la vitesse maximale du véhicule est obtenue à la vitesse maximale du moteur électrique. Une autre différence à noter est que, généralement, les véhicules électriques n’ont qu’une seule réduction de vitesse, qui est celle du différentiel (entraînement final). Étant donné que les véhicules électriques actuels n’ont pas de boîtes de vitesses à plusieurs étapes, le rapport supérieur n’existe pas donc dans notre méthode de calcul, nous considérerons son rapport comme étant de 1.00 (ce qui signifie que cela n’a aucune influence sur la vitesse et le couple de sortie).
L’hypothèse principale lors du calcul du rapport de transmission différentiel est que la vitesse maximale du véhicule est obtenue au régime moteur de puissance maximale (ICE) ou au régime moteur maximal (moteur électrique). De cette hypothèse, nous pouvons tirer un schéma cinématique simplifié du groupe motopropulseur.

Image: calcul du rapport de démultiplication différentiel – schéma cinématique
où:
NPmax – est le régime moteur à la puissance maximale
rapport de transmission ix (boîte de vitesses) du rapport engagé
i0 – rapport de transmission différentiel
NIN – vitesse d’entrée du différentiel
NOUT – vitesse de sortie du différentiel
NVmax – vitesse des roues à la vitesse maximale du véhicule
Observation: Dans le cas des véhicules électriques (VE), la paire d’engrenages qui forme la le rapport de démultiplication ix n’existe pas. La sortie du moteur électrique est connectée directement à l’arbre d’entrée différentiel.
Revenir en arrière
Valeur initiale du rapport de démultiplication
Puisqu’il existe une liaison mécanique entre le moteur/moteur et la roue, sans glissement, et en supposant que le véhicule roule en ligne droite, on peut écrire l’équilibre de vitesse du différentiel :
\
La vitesse d’entrée différentielle peut s’écrire en fonction du régime moteur et du rapport engagé de la boîte de vitesses :
\
De plus, la vitesse de sortie différentielle est égale à la vitesse de la roue (en supposant qu’il n’y ait pas de glissement du pneu):
\
La vitesse de rotation de la roue peut s’écrire en fonction de la vitesse du véhicule et du rayon de roue :
\
En remplaçant (4) en (3) puis (2) et (3) en (1) donne :
\
Comme discuté précédemment, on considérera que dans le cas d’un véhicule propulsé par un moteur à combustion interne, la vitesse maximale du véhicule est obtenue à une vitesse supérieure à la vitesse maximale de puissance. Nous allons donc introduire un coefficient de vitesse maximum cNmax qui sera multiplié par NPmax.
\
À partir de (6), nous pouvons extraire l’équation qui calcule le rapport différentiel initial:
\{i_{0i} = \frac{c_{Nmax}\cdot N_{Pmax}\cdot r_{w}}{2.6526\cdot i_{x}\cdot V_{max}}}\tag{7}\]
Retour en arrière
Valeur finale du rapport de démultiplication
L’équation (7) donne la valeur théorique (initiale, brute) du rapport de démultiplication différentiel. Le rapport de démultiplication réel (final) est calculé à partir du nombre de dents de la maille d’engrenage. Pour calculer cela, nous devons d’abord définir le nombre de dents de l’engrenage d’entrée (pignon) zIN.
Le nombre minimum de dents pour l’engrenage d’entrée dépend du type d’engrenage utilisé pour le différentiel.

Image: Engrenage conique hypoïde |

Image: Engrenage hélicoïdal à axe parallèle |
Selon la disposition du groupe motopropulseur, les véhicules ont différents ensembles d’engrenages pour le différentiel:
- les moteurs / véhicules à moteur longitudinaux ont des engrenages coniques hypoïdes, du fait que l’axe de l’arbre de sortie de la boîte de vitesses est perpendiculaire à l’axe de l’essieu moteur
- les moteurs / véhicules à moteur transversaux ont des engrenages hélicoïdaux, du fait que l’axe de l’arbre de sortie de la boîte de vitesses est parallèle à l’axe de l’essieu moteur
En général, les véhicules à moteur à combustion interne ont les deux biseaux hypoïdes et engrenages hélicoïdaux, en fonction de l’emplacement et du support moteur. Les véhicules électriques ont cependant des engrenages hélicoïdaux à axe parallèle pour le différentiel puisque l’axe du moteur est parallèle à l’axe de l’essieu moteur.
Pour l’engrenage conique hypoïde, le nombre minimum de dents dépend de la valeur du rapport de démultiplication. L’engrenage d’entrée est appelé pignon et a moins de dents que l’engrenage de sortie.
| i0 | 2.5 | 3 | 4 | 5 | 6-7 | >7 |
| zIN | *15 | *12 | 9 | 7 | 5 | 5 |
* pour des rapports de démultiplication inférieurs à 3, le pignon peut avoir 11 dents ou plus
Pour un engrenage hélicoïdal, le nombre minimal de dents du pignon d’entrée peut être n’importe quel nombre compris entre 14 et 17. Dans le cas des véhicules électriques, si le rapport de transmission final est élevé (> 10,00), le mécanisme d’engrenage simple peut être divisé en un train d’engrenages à deux étages. Ceci est généralement fait pour limiter la taille de l’engrenage de sortie.

Image: Engrenage hélicoïdal à deux étages – 3 axes parallèles |
Image: Engrenage hélicoïdal à deux étages – 2 axes concentriques |
Dans le cas de l’engrenage à deux étages, le rapport de démultiplication global sera le produit entre les rapports de démultiplication intermédiaires:
\
Pour plus de simplicité, dans nos exemples de calcul, nous ne considérerons que des ensembles d’engrenages simples pour le différentiel.
Le nombre de dents des engrenages différentiels n’est qu’une estimation approximative (valeurs de départ). Le nombre final dépendra de plusieurs facteurs tels que: la géométrie, la taille, la fiabilité, le processus de fabrication, etc.
Après avoir décidé du type d’engrenage, nous pouvons choisir le nombre de dents pour l’engrenage d’entrée (pignon). Par exemple, nous pouvons choisir plusieurs valeurs, par exemple:
\
L’étape suivante consiste à calculer le nombre de dents de l’engrenage de sortie zOUT, qui est le produit entre le nombre de dents de l’engrenage d’entrée et le rapport de démultiplication initial du différentiel.
\
L’équation (9) donnera un nombre réel pour le nombre de dents de l’engrenage de sortie. Nous devrons arrondir ce nombre au nombre entier le plus proche. Par exemple, si zOUT = 73,234, il sera arrondi à 73, si zOUT = 81,74, il sera arrondi à 82.
Revenir en arrière
Correction du rapport de démultiplication
Puisque zOUT sera différent de la valeur initiale calculée, nous devons recalculer le rapport de démultiplication avec la valeur arrondie de zOUT.
\
Avec le rapport de démultiplication recalculé, nous pouvons également recalculer la vitesse maximale du véhicule, pour voir les écarts par rapport à la valeur initiale. Si nous réorganisons l’équation (7), nous obtiendrons l’expression de la vitesse maximale comme suit:
\
Pour nous assurer que l’exigence de vitesse maximale est satisfaite, nous n’avancerons que les rapports de démultiplication pour lesquels la vitesse maximale est atteinte ou dépassée.
Le critère final du calcul du rapport de démultiplication est l’erreur relative entre la valeur initiale du rapport de démultiplication et les valeurs finales après l’arrondi de zOUT.
\}\tag {12}\]
Le rapport de démultiplication qui a la plus petite erreur relative va être choisi comme valeur finale pour le différentiel (entraînement final).
Retour en arrière
Diagramme logique
Toutes les étapes du calcul du rapport différentiel sont résumées dans le diagramme logique ci-dessous.
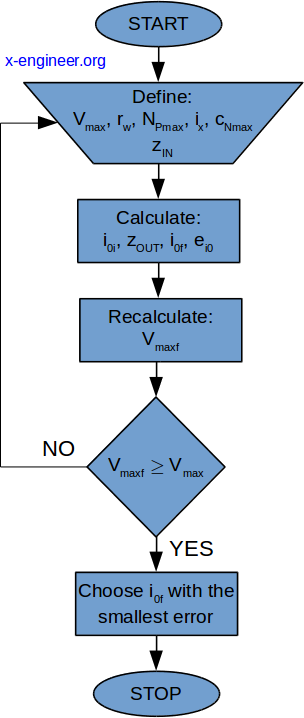
Image: calcul du rapport de transmission différentiel – diagramme logique
Retour en arrière
Exemple pour un véhicule à combustion interne
Pour le véhicule BMW à partir du tableau ci-dessus calculons le rapport de transmission final (différentiel) en fonction des données d’entrée. Comme nous avons déjà fourni la valeur réelle du rapport de démultiplication, nous pouvons la comparer à notre valeur calculée pour valider le processus de calcul.
Étape 1. Calculez le rayon de roue, consultez l’article Comment calculer le rayon de roue pour plus de détails.
\
Étape 2. Calculer le rapport de démultiplication initial à l’aide de l’équation (7).
\
Comme vous pouvez le voir, la valeur initiale calculée de 3,472 est très proche de la valeur du fabricant de 3,46.
Étape 3. Définissez 4 valeurs pour le nombre de dents de l’engrenage d’entrée (pignon).
\
Étape 4. Calculer le nombre de dents pour l’engrenage de sortie en utilisant l’équation (9) et arrondir vers l’entier le plus proche.
\
Étape 5. Recalculer le rapport de démultiplication différentiel à l’aide de l’équation (10).
\
Étape 6. Recalculer la vitesse maximale du véhicule à l’aide de l’équation (11) et arrondir vers l’entier le plus proche.
\
Comme vous pouvez le voir, pour le rapport de transmission de 3.5 la vitesse maximale du véhicule est inférieure à l’objectif initial de 280 km/h. Pour cette raison, nous n’allons pas considérer le rapport de transmission de 3,5 pour notre décision finale.
Étape 7. Calculer l’erreur relative des rapports de démultiplication finaux 3,455 et 3,462 par rapport à la valeur initiale de 3,472 en utilisant l’équation (12).
\
La plus petite erreur concerne le rapport de transmission de 3,462, elle sera donc choisie pour le véhicule comme paramètre de conception.
Étape 8. Énumérez les paramètres finaux pour le calcul du rapport de démultiplication.
\
Comme vous pouvez le voir, notre valeur calculée (jusqu’à la deuxième décimale) est exactement la même que celle fournie par le fabricant, ce qui prouve que la méthode de calcul est correcte.
Observation: Cette méthodologie de calcul prend principalement en compte les critères de vitesse maximale et certains critères de géométrie des engrenages. En réalité, la décision concernant le nombre de dents de l’engrenage peut prendre en compte d’autres facteurs tels que: fabrication, usure, fiabilité, géométrie, etc. et le résultat final du rapport de démultiplication peut différer.
Revenir en arrière
Exemple pour un véhicule électrique
Pour le véhicule Ford Mach-E à partir du tableau ci-dessus, calculons le rapport de transmission final (différentiel) en fonction des données d’entrée. Comme nous avons déjà fourni la valeur réelle du rapport de démultiplication, nous pouvons la comparer à notre valeur calculée pour valider le processus de calcul.
Étape 1. Calculez le rayon de roue, consultez l’article Comment calculer le rayon de roue pour plus de détails.
\
Étape 2. Calculer le rapport de démultiplication initial à l’aide de l’équation (7).
\
Comme vous pouvez le voir la valeur calculée initiale de 9.148 est relativement proche de la valeur fabricant de 9,050.
Étape 3. Définissez 4 valeurs pour le nombre de dents de l’engrenage d’entrée (pignon).
\
Étape 4. Calculer le nombre de dents pour l’engrenage de sortie en utilisant l’équation (9) et arrondir vers l’entier le plus proche.
\
Étape 5. Recalculer le rapport de démultiplication différentiel à l’aide de l’équation (10).
\
Étape 6. Recalculer la vitesse maximale du véhicule à l’aide de l’équation (11) et arrondir vers l’entier le plus proche.
\
Comme vous pouvez le constater, pour un rapport de transmission de 9,176, la vitesse maximale du véhicule est inférieure à l’objectif initial de 180 km/h. Pour cette raison, nous n’allons pas considérer le rapport de transmission de 9.176 pour notre décision finale.
Étape 7. Calculer l’erreur relative des rapports de démultiplication finaux de 9,143, 9,133, 9,125 et par rapport à la valeur initiale de 9,148 en utilisant l’équation (12).
\
La plus petite erreur concerne le rapport de transmission de 9,143, elle sera donc choisie pour le véhicule comme paramètre de conception.
Étape 8. Énumérez les paramètres finaux pour le calcul du rapport de démultiplication.
\
Comme vous pouvez le voir, notre valeur calculée du rapport de démultiplication est relativement plus proche de celle publiée par le fabricant.
Revenir en arrière
Calculatrice
Vous pouvez essayer différents paramètres du véhicule et obtenir le rapport de transmission différentiel à l’aide de la calculatrice ci-dessous.
| Vmax | rw | ix | NPmax | cNmax |
| Calculer le rapport de démultiplication | i0i = 2.802 | |||
| zIN1 = | zOUT1 = 25 | i01f =2.778 | ei01 = 0,864 | Vmaxf1 = 252.2 |
| ZOUT2 = 31 | i02f = 2,818 | ei02 = 0,578 | Vmaxf2 = 0,578 | |
| ZOUT3 = 36 | i03f = 2,769 | ei03 = 1,169 | Vmaxf3 = 253.0 | |
Un script Scilab qui calcule automatiquement le rapport différentiel est disponible sur la page Patreon.
Revenir en arrière